Non-stop Robotics
289 Technology Seminar
2019
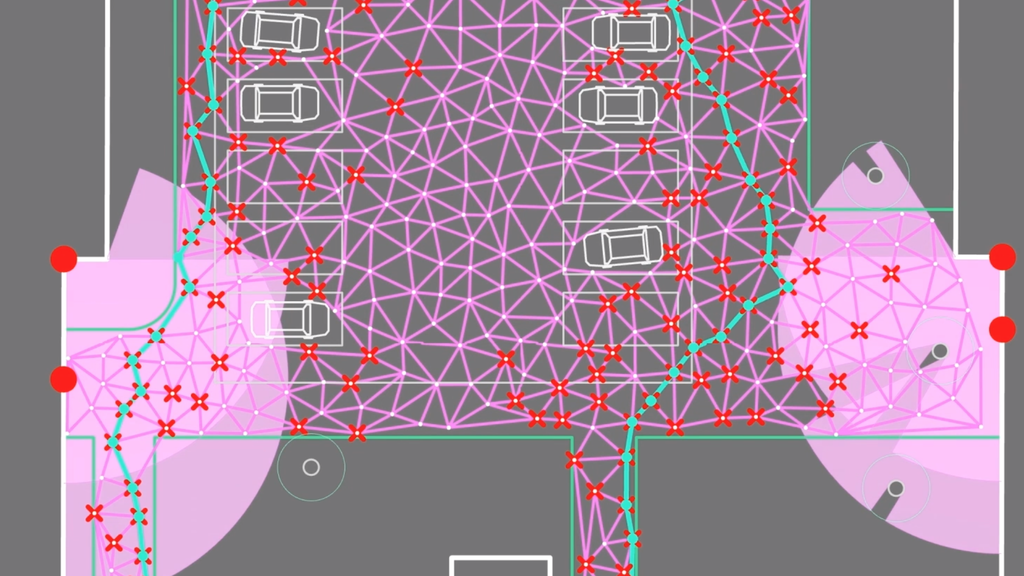
When the self-driving cars and autonomous robots entered our daily urban life, it raised fundamental questions about the current infrastructure. What sorts of new infrastructure can help sustain public sector participation and maximize public interest and safety? Would the robot adjust its behavior and functions to accommodate the ready-built infrastructure, or the infrastructure should be upgraded for the robot? This seminar considered new forms of robot/infrastructure and how they interact with humans. New reconfigurations of embodiment, sensing system, path finding, action and control were designed and prototyped based on mobility robot systems, such as TurtleBot and Gita.
Students: Nathan Adams, Abdullah Alsanea, Yudi An, Fangyu Cui, Chaowei Fang, Yuan Gao, Zhili Geng, Tingji Guo, Jianqiao He, YamChing Hui, Yanxu Jia, Abhi Kalra, Qingzhi Li, Qinxuan Li, Yifei Li, Yishuang Li, Mingjia Liu, Zhikun Liu, Maulaen Maniyar, Kemou Nie, Dhruvil Soni, Mengyi Wang, Bingqing Xu, Yuting Zhang, Jianlan Zhao, Nanxuan Zheng, Wei Zou.
Related Faculty |
Marta Nowak, Kaiho Yu |
Related topics |
Robotics |
- Non-Stop Robotics, a compilation video of several student projects